行業新聞
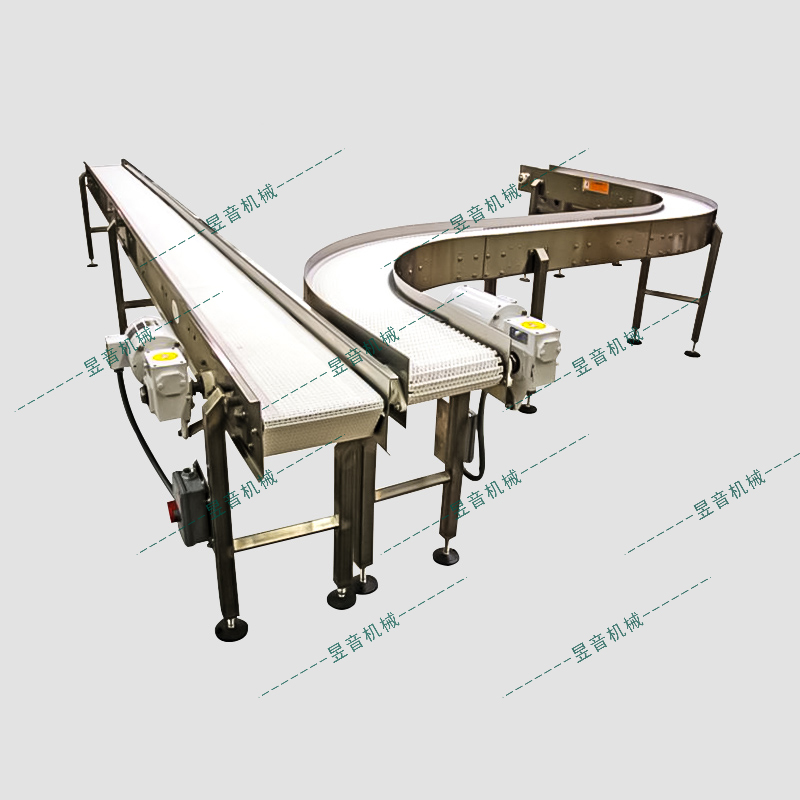
大型動力滾筒輸送機廣泛地應用在冶金、煤炭、交通、水電、化工等部門,具有輸送量大、結構簡單、維修方便、通用性強等優點,但在運行過程中可能出現跑偏、打滑、撕裂、斷帶、堆料等故障,一旦這些故障沒有及時檢測出來,將會造成經濟損失,甚至導致人員傷亡或設備損壞。因此提高大型動力滾筒輸送機的安全性與可靠性極為重要,運用故障預測技術預先診斷關鍵部件或子系統的功能狀態,并預測其正常工作的時間長度;并根據診斷和預測信息等對輸送機維修活動做出決策。
作為典型的大型機電系統,動力滾筒輸送機包括驅動裝置、拉緊裝置、裝載裝置、機架、托輥、滾筒等部分,其輸送距離可達數千米。因此,通過單一傳感信號無法實現對動力滾筒輸送機運行狀態的采集。為實現對其有效的狀態監測,傳感器需分散布置在各測點采集不同信號(加速度、壓力、溫度等),考慮到輸送機傳輸距離較長,設計使用自動巡檢設備,并通過網絡進行多路傳感信號的遠程傳輸,實現故障診、狀態評估等目的。
巡檢裝置機械傳動部分:現階段國內動力滾筒輸送機主要通過人工定期巡檢的辦法來進行故障的排查。采用人工巡檢時效率低,錯誤率高,一旦出現故障出現而未能監測出將會造成重大事故。因此考慮采用自動巡檢系統來進行多傳感器的信息采集,實現狀態監測與故障診斷工作。

巡檢裝置需要沿輸送機進行往返運動以進行數據采集工作,在故障點須能進行定位,并反饋位置信息。考慮到大型帶輸送機輸送距離遠的特點,應對巡檢裝置進行遠距離傳動,而巡檢裝置本身的供電狀況比較差并要求其質量應盡可能的小,所以動力源應置于裝置外部。整個傳動部分要求簡單高效,故采用了鋼絲繩牽引的方式進行傳動。
工作原理如下:驅動電機1的摩擦輪通過鋼絲繩5與巡檢裝置4連接,巡檢裝置吊在軌道2上,軌道固定在動力滾筒輸送機的一旁,另外應安裝張緊裝置對鋼絲繩進行張緊。
巡檢裝置的驅動系統:對動力源電動機的要求是運行穩定、易于控制、轉速較低即可,因此選用步進電機作為驅動電機。步進電機帶動摩擦輪上的鋼絲繩,之后通過與巡檢艙的連接,驅動巡檢艙,最后通過一個導向輪實現一個閉環。
巡檢裝置的自動控制系統:巡檢艙在監測過程中由上位機的信號控制,并需要實現較為精確的位置控制。具體為通過往復的運動對動力滾筒輸送機的每個托輥進行運行狀態的采集,在每個托輥位置停止運動并能反饋位置信號。
用過光電編碼器即可測得巡檢艙的位置信息,考慮鋼絲繩可能導致的打滑等問題,應設置接近開關在每次往返后進行誤差消除。
選用了步進電機細分驅動器并使用單片機對其進行控制。單片機選用了AVR公司的ATmega16L單片機,使用其輸出脈沖對步進電機進行控制,ATmega16L的快速PWN模式可用來產生高頻的PWM波形。由于步進電機細分驅動器對脈沖寬度沒有要求,因此將快速PWM模式設定為方波輸出,在中斷程序中修改計數器的計數周期就可以實時改變方波輸出頻率。
其系統控制框圖如下,巡檢裝置的傳感監測系統:巡檢裝置需要對動力滾筒輸送機可能存在的跑偏、打滑、撕裂、斷帶、火災等故障進行監測并判斷,其內部應裝有振動、溫度、噪聲、煙霧等傳感器。考慮到運行時間長,重復監測檢測次數多等特點,應避免故障診斷及報警過程的過于復雜,故將數據處理過程以及報警過程安排在巡檢裝置內部進行。